 |
 |
 |
 |
| Alvin | Alvin | Robot | |
 |
 |
 |
 |
| Cousteau | Cyana | Perry | Trieste - Piccard |
 |
 |
 |
 |
| Alvin - Titanic | Alvin | Alvin | Alvin - Atlantis |
 |
 |
 |
 |
| ROV Isis - UK | Nautile - Francia | Robot | Autosub - UK 2009 |
 |
 |
 |
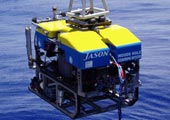 |
| Nautilus - H.Wilkins 1931 | Sea Lab | ROV Jason Junior - Titanic | ROV Jason II - Woods Hole |
 |
 |
 |
 |
| ROV Nereus | Robot Kaiko | ROV | Trineo |
 |
 |
 |
 |
| Híbrido Nereus | Capt.Stanley DIY | Johnson Sea Link | ROV Scorpio UK Rescue |
 |
 |
 |
 |
| NSRS | NSRS | URF - Suecia | MSM I/S - Italia |
 |
 |
 |
|
| Conrad - -Maldivas | Triton 1000 |